產(chǎn)品介紹
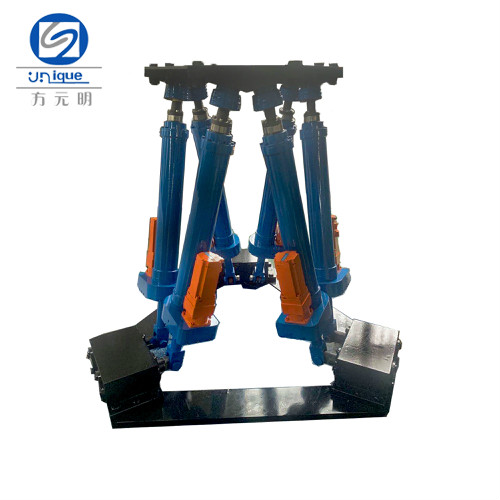
在調(diào)平系統(tǒng)中,,調(diào)平控制器接收傾角傳感器輸出的縱傾角和橫傾角信息,,經(jīng)過調(diào)平算法計算后,通過驅(qū)動系統(tǒng)控制各支腿的伸出和縮回,, 最終使工作平臺上的縱傾角和橫傾角達(dá)到一定的水平精度內(nèi),,是整個系統(tǒng)的中央邏輯處理單元。西安方元明科技股份有限公司推出的調(diào)平控制器產(chǎn)品采用28V電源輸入,,具有使用方便,、可靠性高、環(huán)境適應(yīng)性強(qiáng)等特點(diǎn),。
主要組成:
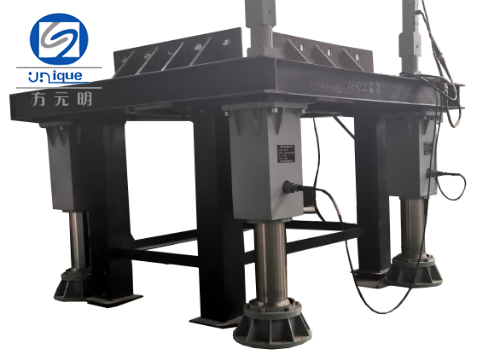
調(diào)平系統(tǒng)主要由平臺機(jī)械支撐傳動系統(tǒng)和平臺測量控制系統(tǒng)組成,。
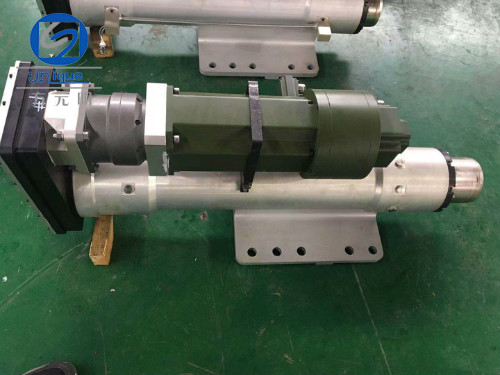
a)平臺機(jī)械支撐傳動系統(tǒng):電動缸,;
b)驅(qū)動系統(tǒng):伺服驅(qū)動器、伺服電機(jī),;
c)測量控制系統(tǒng):傾角傳感器,、調(diào)平控制器、手控盒,;
d)電源系統(tǒng):電源組件與線纜等,。
支腿組成

產(chǎn)品特點(diǎn):
操作快捷
通過操作控制器面板,可對系統(tǒng)進(jìn)行自動控制,,對支腿進(jìn)行手動控制,。
實(shí)時反饋
控制器設(shè)置了一系列狀態(tài)顯示信息,方便客戶在調(diào)試,、運(yùn)行過程中瀏覽了解系統(tǒng)和支腿的實(shí)時相關(guān)狀態(tài)參數(shù),。
環(huán)境適應(yīng)性強(qiáng)
可對控制器內(nèi)部參數(shù)進(jìn)行修改,以適應(yīng)不同應(yīng)有環(huán)境和要求,。
精度高
控制器采用多點(diǎn)調(diào)平算法結(jié)合公司自主電動缸產(chǎn)品,,連續(xù)調(diào)平精度最高可達(dá)并穩(wěn)定于45′以內(nèi)。


安裝尺寸


調(diào)平控制器面板(19英寸3U)

![]() 手動速度(mm/min):
手動速度(mm/min):
手動操作時缸的升收速度,。
自動速度(mm/min):
自動運(yùn)行時缸的伸收速度,,包括"一鍵調(diào)平"的伸腿速度和“一鍵撤收”的撤收速度;
行程上限(mm)(相對于軟零點(diǎn)):
行程上限 = 缸的實(shí)際物理行程 - 缸安裝后定的零點(diǎn)位置,。
抬升距離(mm):
相對于軟零點(diǎn),。
電流閾值A(chǔ):
用來判斷“虛腿”,若電機(jī)實(shí)際電流大于該閾值,,認(rèn)為支撐到位,;默認(rèn)值為0,正常情況下不需要設(shè)置,。
當(dāng)前圈數(shù),、當(dāng)前脈沖數(shù):
顯示電機(jī)編碼器實(shí)際位置。
零點(diǎn)圈數(shù),、零點(diǎn)脈沖數(shù):
顯示設(shè)置為軟零點(diǎn)時的4臺電機(jī)編碼器位置,。
零點(diǎn)設(shè)置:
零點(diǎn)設(shè)置后正常情況下不需要修改。
操作流程
1) 系統(tǒng)上電(600V和28V),,等待15~30秒的初始化時間,;
2) 下發(fā)“設(shè)備自檢”命令,若收到“自檢成功”,,則進(jìn)行下一步,;若收到“自檢失敗”,則等待幾秒再次自檢,,若長時間多次自檢均不成功,,需要查找原因,;
3) 下發(fā)“一鍵調(diào)平(升車)”命令,開始進(jìn)行調(diào)平,,直到收到“調(diào)平成功”,,若車體傾斜角度過大會導(dǎo)致調(diào)節(jié)超行程,收到的則會是“調(diào)平失敗”,;在調(diào)平過程中,,上位機(jī)得到的狀態(tài)信息為“升車正常”,;
4) 不論調(diào)平成功還是失敗,,下發(fā)“一鍵撤收(降車)”命令,開始進(jìn)行撤收,,直到收到“撤收成功”,;在撤收過程中,上位機(jī)得到的狀態(tài)信息為“降車正?!?;
5) 在調(diào)平和撤收期間,下發(fā)“急?!泵?,缸會立即停止;在靜止?fàn)顟B(tài),,上位機(jī)得到的狀態(tài)信息為“狀態(tài)未知”,;
6) 收到“伺服報警”信息,說明伺服發(fā)生了報警,,一般情況下將系統(tǒng)重新上電可進(jìn)行清除,,然后“一鍵撤收”收回支撐腳。

注意事項
1.只有在4個缸都處于零點(diǎn)位置時,,才能執(zhí)行調(diào)平命令,;
若在調(diào)平過程中發(fā)布了急停命令,則需要通過一鍵撤收將缸全部歸零位,,再發(fā)布一鍵調(diào)平命令,。
2.調(diào)平過程中車體不能因人為因素持續(xù)晃動,否則會因無法得到準(zhǔn)確角度信息而導(dǎo)致調(diào)平失??;
3.車體傾斜度不能過大,,否則缸的行程不足以實(shí)現(xiàn)調(diào)平,,缸在伸出后判斷出無法調(diào)平,會停止動作,;
4.伺服一直報警
一般情況下重新上電可以清除報警,,若無法清除,,需要查看伺服說明書或聯(lián)系廠家解決。
日常維護(hù)
1.電動缸外表面保養(yǎng)周期為:7天(用棉布對表面擦拭),;
2.檢查缸體外表面螺釘緊固件是否有松動,,保養(yǎng)周期為3天;作戰(zhàn)后檢查擦拭關(guān)節(jié)軸承,,保持其旋轉(zhuǎn)靈活,,保養(yǎng)周期為:1個月。
3.驅(qū)動器電機(jī)線纜連接處是否松動,;
4.注意檢查接地點(diǎn)是否牢靠,。
定期維護(hù)檢查
作戰(zhàn)后進(jìn)行設(shè)備大型維修時,需要對絲杠副進(jìn)行以下維護(hù)
1.檢查絲杠螺母與推桿的連接是否有松動,;
2.檢查絲杠副是否有轉(zhuǎn)動不靈活現(xiàn)象,;
3.檢查絲杠副是否有異常噪音或噪音大的現(xiàn)象;
4.檢查限位開關(guān)的固定連接是否有松動,,保養(yǎng)周期為:1個月,。
5.電機(jī)維護(hù)保養(yǎng)時需注意以下事項:
a.電源接通/切斷操作應(yīng)當(dāng)由操作人員自己動手;
b. 電源切斷后有一段時間內(nèi)電路保持著高電壓充電狀態(tài),,檢查工作應(yīng)當(dāng)在電源切斷后,,面板上的LED燈熄滅后約5分鐘開始進(jìn)行; c.不要進(jìn)行絕緣電阻測量,,這樣將損壞驅(qū)動單元,。
應(yīng)用領(lǐng)域:
多點(diǎn)調(diào)平系統(tǒng)在許多個領(lǐng)域都有應(yīng)用,如光電系統(tǒng),、靜力壓樁機(jī),、空中作業(yè)平臺、醫(yī)療車,、吊車,、數(shù)控機(jī)床、海上作業(yè)平臺和SMC成型液壓機(jī)等,。